| ☀ Tip: Train Editor |
| You can use the Train Editor to more conveniently edit the train.dat. This page should still be used as a reference. However, you can also edit the train.dat manually if so desired. |
| Version 1.22 is being used: | |
| ▶ | BVE1220000 |
| Version 2.0 is being used (choose either one): | |
| ▶ |
BVE2000000 OPENBVE |
| #NameOfTheSection |
| #ACCELERATION |
| This starts the section. |
| a0, a1, v1, v2, e |
|
a0: A positive floating-point number representing the acceleration at a speed of 0 km/h expressed in km/h/s. a1: A positive floating-point number representing the acceleration at a speed of v1 expressed in km/h/s. v1: A positive floating-point number representing a reference speed in km/h corresponding to a1. v2: A positive floating-point number representing a reference speed in km/h corresponding to e. e: A positive floating-point number representing an exponent. The behavior is different for version 1.22 and version 2.0 file formats. |
| Acceleration between 0 km/h and v1, where x is the current speed of the train in km/h: | |
| ƒ | a0 + (a1 - a0) * x / v1 |
| Acceleration between v1 and v2, where x is the current speed of the train in km/h: | |
| ƒ | v1 * a1 / x |
| For version 2.0: Acceleration above v2, where x is the current speed of the train in km/h: | |
| ƒ | v1 * a1 * v2e-1 / xe |
| Converting a version 1.22 exponent into a version 2.0 exponent: | |
| ƒ | e2.0 = min(1 - v2 * log(e1.22) / log(9/4), 4) |
| Example of an Acceleration section for 4 power notches: | |
| ▶ |
#ACCELERATION 0.77,0.39,7,7,1 1.96,1.96,24,24,3 1.96,1.96,52,52,3.4 1.96,1.96,52,83,2.7 |
| #PERFORMANCE |
| This starts the section. |
| ☀ | The following spelling variations can be used: |
| #PERFORMANCE, DECELERATION |
| Deceleration |
| CoefficientOfStaticFriction |
| Reserved |
| CoefficientOfRollingResistance |
| AerodynamicDragCoefficient |
| Example of a Performance section: | |
| ▶ |
#PERFORMANCE 3.6 0.35 0 0.0025 1.1 |
| #DELAY |
| This starts the section. |
| DelayPowerUp |
| DelayPowerDown |
| DelayBrakeUp |
| DelayBrakeDown |
| Example of a Pressure section: | |
| ▶ |
#DELAY 0.5 0 0.32 0.32 |
| #MOVE |
| This starts the section. |
| JerkPowerUp |
| JerkPowerDown |
| JerkBrakeUp |
| JerkBrakeDown |
| BrakeCylinderUp |
| BrakeCylinderDown |
| Example of a Move section: | |
| ▶ |
#MOVE 500 3000 3000 500 200 160 |
| #BRAKE |
| This starts the section. |
| BrakeType |
| ▸ Options for BrakeType: |
|
0: Electromagnetic straight air brake 1: Digital/analog electro-pneumatic air brake without brake pipe (electric command brake) 2: Air brake with partial release feature |
| BrakeControlSystem |
| ▸ Options for BrakeControlSystem: |
|
0: None 1: Closing electromagnetic valve (lock-out valve) (締切電磁弁) 2: Delay-including control (遅れ込め制御) |
| ƒ | 0.5 * (MaximumAcceleration + Deceleration) |
| BrakeControlSpeed |
| Example of Brake section: | |
| ▶ |
#BRAKE 0 1 10 |
| #PRESSURE |
| This starts the section. |
| BrakeCylinderServiceMaximumPressure |
| BrakeCylinderEmergencyMaximumPressure |
| MainReservoirMinimumPressure |
| MainReservoirMaximumPressure |
| ⓘ Brake cylinder and main reservoir |
| Note that for all brake systems, the pressure in the brake cylinder can never exceed the highest pressure that can be produced in the main reservoir. As such, setting BrakeCylinderEmergencyMaximumPressure to a higher value than MainReservoirMaximumPressure will result in lower deceleration than set by Deceleration in the Pressure or Deceleration section. If BrakeCylinderEmergencyMaximumPressure is greater than MainReservoirMinimumPressure, there might not be enough pressure available in the main reservoir to obtain a full service or emergency brake application, and also, the brake cylinder might not be exhaused immediately with the automatic air brake and the electromagnetic straight air brake. |
| BrakePipeNormalPressure |
| Example of a Pressure section: | |
| ▶ |
#PRESSURE 440 440 690 780 490 |
| #HANDLE |
| This starts the section. |
| HandleType |
| ▸ Options for HandleType: |
|
0: Separate power and brake handles 1: One combined power and brake handle |
| PowerNotches |
| BrakeNotches |
| PowerNotchReduceSteps |
| ☀ Frequently used application: |
| If the value is set to PowerNotches, the driver needs to reset the power notch to neutral before the power is actually reduced. If the driver wanted to go from power notch P4 to power notch P3, it would be first required to move down to neutral. When going down from P4 over P3, P2 and P1, the internal power output will still resemble power notch P4 during that time. Only once the neutral position is reached will the power output be actually reduced to zero. The driver could then increase the power to P3 as initially desired. |
| Example of a Handle section: | |
| ▶ |
#HANDLE 0 4 8 0 |
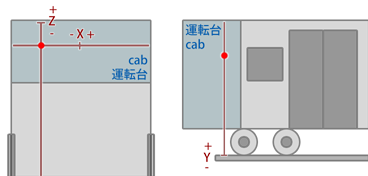
| #CAB |
| This starts the section. |
| ☀ | The following spelling variations can be used: |
| #CAB, #COCKPIT |
| X |
| Y |
| Z |
| DriverCar |
| Example of a Cab section: | |
| ▶ |
#CAB -900 2750 -1000 0 |
| #CAR |
| This starts the section. |
| MotorCarMass |
| NumberOfMotorCars |
| TrailerCarMass |
| NumberOfTrailerCars |
| LengthOfACar |
| FrontCarIsAMotorCar |
| ▸ Options for FrontCarIsAMotorCar: |
|
0: The front car is not a motor car, but a trailer car. This is the default value. 1: The front car is a motor car. |
| NumberOfMotorCars | NumberOfTrailerCars | FrontCarIsAMotorCar | Effect |
|---|---|---|---|
| 1 | 0 | 1 | There is only one car, and it's a motor car. |
| 1 | n | 0 | The rear car is a motor car. All other cars (including the front car) are trailer cars. This corresponds to a locomotive pushing the train from behind. |
| 1 | n | 1 | The front car is a motor car. All other cars are trailer cars. This corresponds to a locomotive pulling the train from the front. |
| 2 | 0 | 1 | There are two cars and both are motor cars. |
| 2 | 1 | 0 | There are three cars. The front car is a trailer car, and the other two cars are motor cars. |
| 2 | 1 | 1 | There are three cars. The front and rear cars are motor cars, and the car in the middle is a trailer car. |
| WidthOfACar |
| HeightOfACar |
| CenterOfMassHeight |
| ExposedFrontalArea |
| UnexposedFrontalArea |
| Example of a Car section: | |
| ▶ |
#CAR 42 4 36 2 20 0 2.3 3.4 2.6 7.5 1.8 |
| #DEVICE |
| This starts the section. |
| Ats |
| ▸ Options for Ats: |
|
-1: Neither ATS-SN, nor ATS-P are available. 0: ATS-SN is available, but ATS-P is not available. 1: ATS-SN and ATS-P are available. |
| Atc |
| ▸ Options for Atc: |
|
0: ATC is not available. 1: ATC is available but requires manual activation. 2: ATC is available and will automatically activate once transmitting. |
| Eb |
| ▸ Options for Eb: |
|
0: The EB device is not available. 1: The EB device is available. |
| ConstSpeed |
| ▸ Options for ConstSpeed: |
|
0: The constant speed device is not available. 1: The constant speed device is available. |
| HoldBrake |
| ▸ Options for HoldBrake: |
|
0: The hold brake device is not available. 1: The hold brake device is available. |
| ReAdhesionDevice |
| ▸ Options for ReAdhesionDevice: |
|
-1: A readhesion device is not available. 0: The readhesion device type A is used. 1: The readhesion device type B is used. 2: The readhesion device type C is used. 3: The readhesion device type D is used. |
| Type | Reduce interval | Reduce amount | Increase interval | Increase amount | Characteristics |
|---|---|---|---|---|---|
| A | high | instantly zero | medium | very high | Cuts off power instantly and rebuilds it up fast in steps. |
| B | medium | small | high | small | Updates not so often and adapts slowly. Wheel slip can persist longer and power is regained slower. The behavior is smoother. |
| C | medium | medium | medium | medium | The behavior is somewhere in-between type B and type D. |
| D | small | high | small | high | Updates fast and adapts fast. Wheel slip only occurs briefly and power is regained fast. The behavior is more abrupt. |
| LoadCompensatingDevice |
| This entry is not used by openBVE. |
| PassAlarm |
| ▸ Options for PassAlarm: |
|
0: The pass alarm device is not available. 1: The pass alarm device is available and plays a single time. 2: The pass alarm device is available and plays in a loop. |
| DoorOpenMode |
| ▸ Options for DoorOpenMode: |
|
0: The doors are opened automatically, but can also be prematurely opened manually. This is the default. 1: The doors are opened automatically. Manual override is not possible. 2: The doors can only be opened manually. |
| DoorCloseMode |
| ▸ Options for DoorCloseMode: |
|
0: The doors are closed automatically, but can also be prematurely closed manually. This is the default. 1: The doors are closed automatically. Manual override is not possible. 2: The doors can only be closed manually. |
| Example of a Device section: | |
| ▶ |
#DEVICE 1 0 1 0 0 2 0 1 2 2 |
| #MOTOR_Xi |
| SoundIndex, Pitch, Volume |
| Example of a part of a #MOTOR_P1 section: | |
| ▶ |
#MOTOR_P1 -1,100,36 0,100,36 0,100,35 0,100,35 0,100,34 0,100,34 0,100,33 0,100,33 0,100,32 0,100,32 |